In May 2018, I presented at the IEEE International Conference on Robotics and Automation (ICRA) on my work on a self-engaging spined gripper with dynamic penetration and release for steep jumps in Brisbane, Australia.
Research
My research takes inspiration from biology to improve robotic design but also uses robots as physical models to test biology hypotheses. In particular, I'm interested in designs that will make robots more effective in navigating and interacting with their environments to take more of them out of the lab and into the real world.
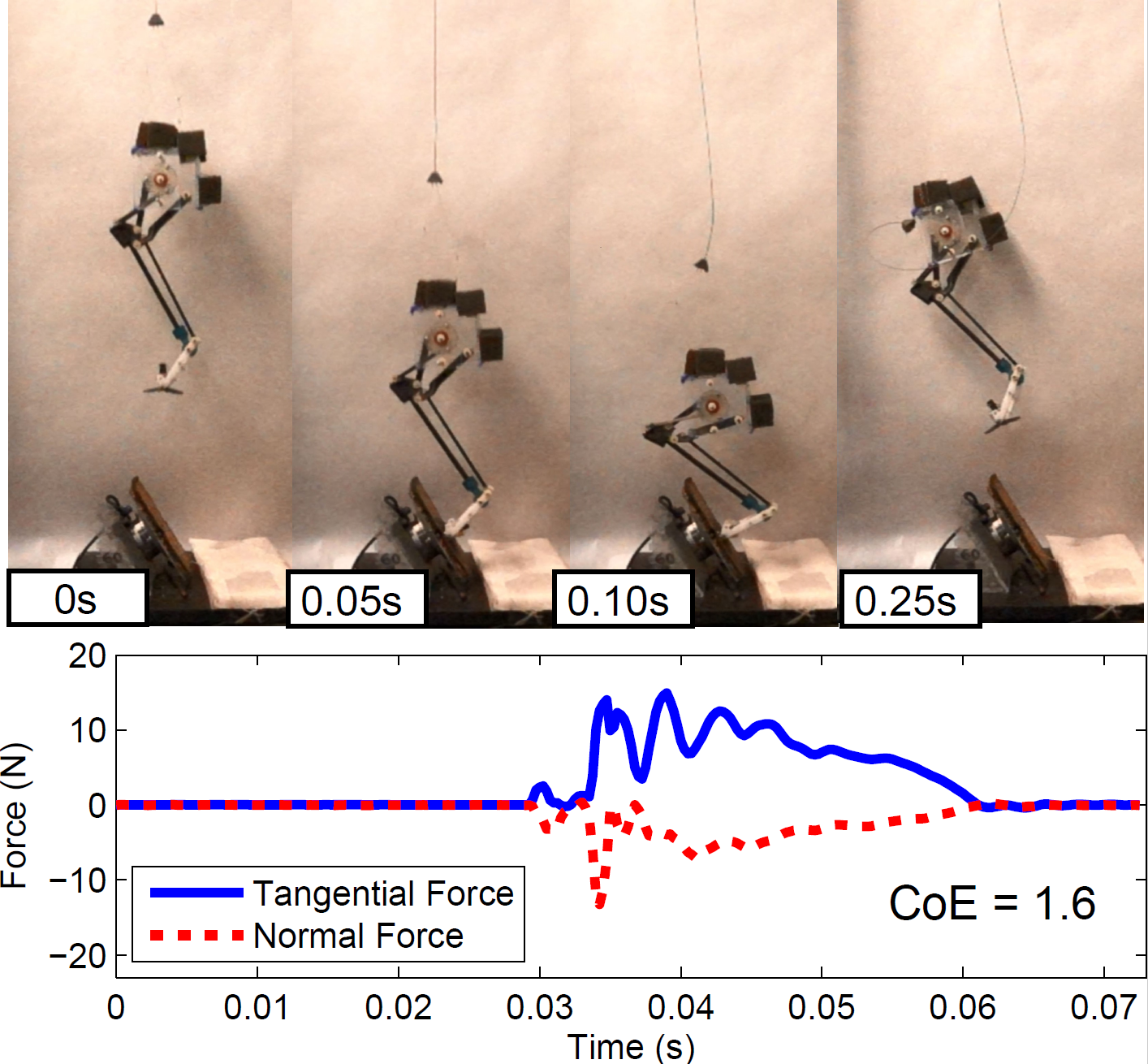
A self engaging gripper mechanism with spines was designed for the monopedal jumping robot, Salto, to reduce slip and provide adhesion capabilities. The mechanism pushes in angled spines along their length and is kinematically constrained to engage/disengage with leg crouch/extension. The resulting gripper introduces no new actuators, enables jumping on penetrable inclines up to 60 degrees, and enables static adhesion to hold 7.5 times the robot's weight from a ceiling.
• Designed and manufactured self-engaging gripper mechanism with spines and attachment rubber pad using 3D printing, milled polypropylene, IR laser cutting, polymer forming, and other manufacturing processes
• Robot able to jump on 60 degree inclines and hold 7.5 times the robot's weight from a ceiling
• 3 different experimental set ups were designed, built, and used successfully. Experiments included 4 different custom made robot feet, 2 different robot linkages, 4 different engagement surfaces, force controlled linear bearings, an ATI force sensor, and custom mounting for the force sensor.
• Processed data from over 1500 data sets taken from experiments using MATLAB
A critical aspect of navigating through your environment successfully is traction through attaching to the environment. Insects do this through friction pads and spines on their tibia. Bio-inspired compound feet with spines and foot pads improved a millirobot's jumping performance by 65%, bringing it close to a no-slip model.
• Designed and manufactured a bio-inspired compound foot with spines and foot pads
• Manufactured 3cm flea-inspired jumping robot through Smart Memory Alloy (SMA) spring construction and Smart Composite Microstructure (SCM) with IR laser
• Robot able to jump on more surface types, on some surfaces jumps farther and faster
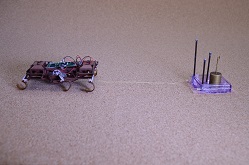
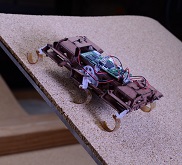
Collapsible leg spines found on insects and spiders provide a passive mechanism for increased traction while running over complex terrain. Spiny feet for VelociRoACH increased the climbable incline, reduced dimensionless Cost of Pulling by an order of magnitude while robot speed and pulling load increased by 50%.
• Designed and manufactured anisotropic collapsible leg spines using UV laser
• Constructed palm-sized cockroach-inspired running robot through Smart Composite Microstructure (SCM) with IR laser, polymer forming, laminating, transmission assembly, 3D printing and surface mounting
• Made terrestrial robots faster, more energy efficient, able to climb higher inclines and pull larger loads
Inspired by the exoskeletons of insects, we have developed a number of manufacturing methods for the fabrication of structures for attachment, protection, and sensing. This manufacturing paradigm is based on infrared laser machining of lamina and the bonding of layered structures. The structures have been integrated with an inexpensive palm-sized legged robot, the VelociRoACH. We also present a methodology to design and fabricate folded robotic mechanisms, and have released an open-source robot, the OpenRoACH, as an example implementation of these techniques. We present new composite materials which enable the fabrication of stronger, larger scale smart composite microstructures (SCM) robots. We demonstrate a simple way to manufacture traction enhancing claws is demonstrated.
Insect legs possess various structures that can enhance interaction with the substrate. To find out how effective friction pads and tibia spines are we jumped eight gryllus firmus on a high traction surface, low friction surface, flowable media, and a penetrable surface. Spines slightly increased performance on the high traction surface and increased performance on the penetrable oneby 82%.
• Designed and conducted experiments testing the effectiveness of cricket tibia spines and foot pads on various substrates
Studies on insects and spiders have shown that in cluttered environments or those having a low probability of foot contact, collapsible leg spines can increase performance. Anisotropic properties of spines permit engagement of complex terrain during thrust, but are easily removed during swing because they collapse toward the leg. We used this architectural advantage as biological inspiration for increasing the performance of a legged robot.
Modular structures built from lattice building blocks have high stiffness to weight ratios, which make them desirable for space applications. These building blocks can be assembled and disassembled to be reconfigured into any structure needed. I designed and created a new end effector for robots to traverse and manipulate a new modular 3D lattice design. This lattice should also be easier to for robots to assemble than past designs. This end effector includes passive spines for engagement and a shape to automatically align itself with the lattice without more control.
Lizard Righting Behavior Using their Tails Jessica Lee, Carlos Casarez, Thomas Libby
University of California, Berkeley
Lizards are able to right themselves using their tails in under 0.2s. We filmed geckos at 1200fps to characterize their various methods in hopes of implementing them in a self-righting robot. We then filmed iguanas to see how tail righting methods scale.
Soft Robot Design to Traverse 3D Space Jessica Lee, Juan Manuel Florez, Jamie Paik
Reconfigurable Robotics Lab at EPFL
I designed and manufactured Soft Pneumatic Actuators (SPAs) for an earthworm-inspired soft, crawling robot to traverse a 3-D space. I also implemented new manufacturing strategies, increasing number of usable SPAs by 40%
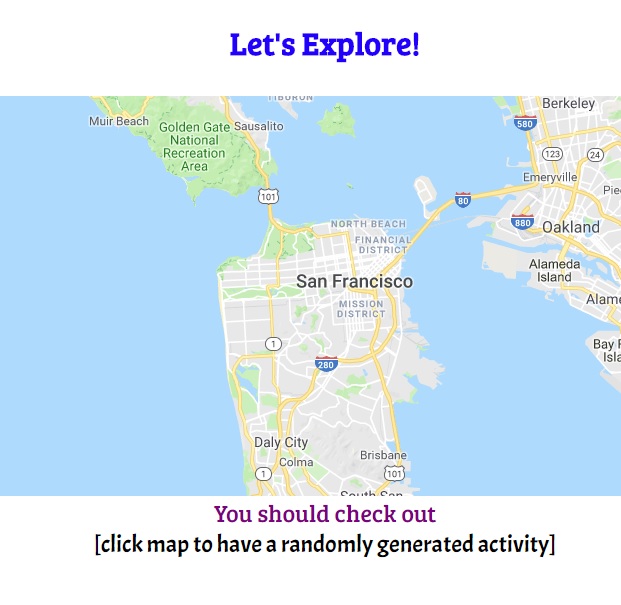
Website to Help Find Things To Do Jessica Lee, Suzy Huang CodeSmith
While attending a one week intensive code camp to learn JavaScript, HTML, and CSS, I put together a website that helps you find things to do anywhere you go. This could be useful if you move to a new area and want to find something to do nearby, but don't want to spend the time googling or reading yelp lists. You just click the area that you want to explore and it randomly generates something nearby. This could also be great for a spontaneous weekend adventure.
Skills, Tools, and Expertise
Engineering: UV Laser, IR Laser, 3D Printing, machine shop, surface mounting, fiberglass making
Coursework: Design of Electromechanical Devices, Biomimetic Engineering, Mechanical Behavior of Engineering Materials, Organism Mechanics, Design Thinking, Sustainable Manufacturing
Specialization: Bio-inspired design, design and manufacturing robots of Smart Composite Microstructure (SCM) and Soft Pneumatic Actuators (SPA), rapid prototyping, experimental biology
Fellowships and Honors
NSF GRFP: National Science Foundation Graduate Research Fellowship Program NSF IGERT: Integrative Graduate Education and Research Trainee Division Winner of IET PATW: Institution of Engineering and Technology Present Around the World (PATW) Competition 2014/2015 College of Engineering Deans Honors Program at UCSB: top 5% of the class Member of National Society of Collegiate Scholars
Outreach and Leadership
Networking Chair for Graduate Women in Engineering (GWE) Networking Chair for Women in Computer Science and Engineering (WiCSE) President of Science and Engineering Community Outreach (SECO) Robotics Lead for Electrical Engineering Outreach Tutoring Chair for Tau Beta Pi (Engineering Honor Society)
In July of 2018 I received a full scholarship from the Women in Skydiving Leadership Network and earned my Coaches Certification for Skydiving. Now I coach skydivers in the wind tunnel and the sky.
I have been to 27 different countries
I have lived in California, Lausanne in Switzerland, and Seoul in South Korea
 hide forever | hide once
hide forever | hide once 









{kind=link}
{kind=link}